Gradient Descent
本章讨论梯度下降算法的基本理论,包括凸优化基础概念、梯度下降算法及其在不同条件下的收敛性分析。
1 问题表述 (Problem Formulation)¶
本章考虑以下 无约束优化问题 :
其中 \(f(x)\) 是可微的目标函数。
符号约定 :
- \(x^\star := \arg\min_{x \in \mathbb{R}^d} \{f(x)\}\) 为问题的 最优解
- \(f^\star := \min_{x \in \mathbb{R}^d} \{f(x)\}\) 为 最优函数值
2 凸集与凸函数¶
2.1 凸集 (Convex Set)¶
定义 1(凸集)
集合 \(\mathcal{X} \subseteq \mathbb{R}^d\) 称为 凸集 ,如果对于 \(\forall x, y \in \mathcal{X}\),有
直观理解:集合中 任意两点之间的线段 都完全包含在集合内部。对于非凸集,可以找到两个点使得连线的某些部分落在集合外部。
凸集的常见例子:
- 超平面 (Hyperplane):\(\{x \mid a^T x = b\}\)
- 半空间 (Halfspace):\(\{x \mid a^T x \le b\}\)
- 欧几里得球 (Euclidean ball):\(\{x \mid \|x - x_c\| \le r\}\)
- 多面体 (Polyhedron):\(\{x \mid a_j^T x \le b_j,\; j = 1, \cdots, m,\; c_j^T x = d_j,\; j = 1, \cdots, p\}\)
2.2 凸函数 (Convex Function)¶
定义 2(凸函数)
函数 \(f: \mathcal{X} \to \mathbb{R}\) 称为 凸函数 ,如果 \(\mathcal{X} \subseteq \mathbb{R}^d\) 是凸集,且对于 \(\forall x, y \in \mathcal{X}\),有
直观理解:函数图像上 任意两点之间的弦 总在函数曲线的上方(或重合)。
凸函数的常见例子:
- 指数函数 :\(e^{ax}\) 在 \(\mathbb{R}\) 上对任意 \(a \in \mathbb{R}\) 是凸的
- 范数 :\(\|x\|_1\) 和 \(\|x\|_2\) 在 \(\mathbb{R}^d\) 上是凸的
- 线性回归损失函数 :\(\|Ax - b\|^2\) 在 \(\mathbb{R}^d\) 上是凸的
- 逻辑回归 :\(\frac{1}{n} \sum_{i=1}^{n} \log(1 + \exp(-b_i a_i^T x))\) 在 \(\mathbb{R}^d\) 上是凸的
凸函数的等价性质¶
引理 1(凸性质 / Convex Property)
设 \(f: \mathcal{X} \to \mathbb{R}\) 可微,则 \(f\) 是凸函数 当且仅当
几何意义:凸函数总在其 切线 (一阶泰勒近似)的 上方 。即函数的 线性近似 是函数值的一个 全局下界 。
2.3 强凸函数 (Strongly-Convex Function)¶
定义 3(\(\mu\)-强凸函数)
函数 \(f: \mathcal{X} \to \mathbb{R}\) 是 \(\mu\)- 强凸 的,如果存在常数 \(\mu > 0\) 使得
与一般凸函数相比,强凸函数不仅在切线上方,还在切线加上一个 二次项 \(\frac{\mu}{2}\|y - x\|^2\) 的上方。参数 \(\mu\) 越大,函数在最小值附近的 "弯曲" 程度越大。
强凸与凸的关系
当 \(\mu = 0\) 时,强凸条件退化为一般凸条件。因此 强凸函数一定是凸函数 ,但反之不成立。
2.4 \(L\)-光滑性 (\(L\)-Smoothness)¶
定义 4(\(L\)-光滑性)
可微函数 \(f: \mathbb{R}^n \to \mathbb{R}\) 称为 \(L\)- 光滑 的,如果对于 \(\forall x, y \in \mathbb{R}^n\),有
其中 \(L > 0\) 是 \(\nabla f\) 的 Lipschitz 常数 。
换言之,梯度 不能变化太快 ——梯度的变化量被 \(L\) 倍的自变量变化量所约束。
上述不等式等价于以下 二次上界 条件(也称 下降引理(Descent Lemma);证明见下方注释):
证明(下降引理 Descent Lemma)
这个不等式在凸优化中通常被称为 下降引理(Descent Lemma)。它是 \(L\)-光滑(\(L\)-smooth)函数的核心性质之一。
1. \(L\)-光滑的定义
若 \(f\) 是 \(L\)-光滑的,则其梯度 \(\nabla f\) 是 \(L\)-Lipschitz 连续的:对任意 \(x, y\),
2. 线段参数化 + 微积分基本定理
定义 \(g(t) := f\bigl(x + t(y - x)\bigr)\),其中 \(t \in [0, 1]\)。由微积分基本定理,
由链式法则,
因此
3. 加减 \(\nabla f(x)\) 并界定剩余项
对最后一个积分项,用 Cauchy–Schwarz 不等式与 \(L\)-Lipschitz 条件:
因而
代回即得
直观理解: 这个不等式说明:当梯度变化速度被 \(L\) 限制时,函数图像可以被一个开口向上的二次函数从上方“罩住”。这也是梯度下降里选取足够小步长时(例如取 \(y = x - \gamma \nabla f(x)\) 且 \(0 < \gamma < \frac{2}{L}\))能保证函数值下降的关键原因。
这意味着 \(f(y)\) 可以被以 \(x\) 为顶点的一个 二次函数上界 约束。
强凸与光滑的几何直觉
对于同时满足 \(\mu\)-强凸和 \(L\)-光滑的函数 \(f\),在任意一点 \(x\) 处,\(f\) 被夹在两个二次函数之间:
- 下界 (强凸性):\(f(y) \ge f(x) + \langle \nabla f(x), y-x \rangle + \frac{\mu}{2}\|y-x\|^2\)
- 上界 (光滑性):\(f(y) \le f(x) + \langle \nabla f(x), y-x \rangle + \frac{L}{2}\|y-x\|^2\)
函数被这两个二次函数 "夹" 在中间,\(\mu\) 和 \(L\) 分别控制着函数弯曲程度的下限和上限。
2.5 例题¶
例题 4(\(f(x)=|Ax|_2^2\) 的强凸与光滑常数)
考虑关于 \(x \in \mathbb{R}^n\) 上的函数
- 若 \(A\) 是列满秩矩阵,请判断 \(f(x)\) 是否为 \(\mu\)-强凸函数(\(\mu\)-strongly convex),是否为 \(L\)-光滑函数(\(L\)-smooth),并用与 \(A\) 相关的矩阵特征值表示 \(\mu, L\) 的具体取值。
- 若 \(A\) 不是列满秩矩阵,此时 \(f(x)\) 是否为 \(\mu\)-强凸函数,是否为 \(L\)-光滑函数?
提示:矩阵 \(AA^T\)、\(A^T A\) 与 \(A\) 有相同的秩。
解答与推导:
先将目标函数写成二次型:
令 \(Q := A^T A\),则 \(Q\) 为对称半正定矩阵。
(1) 计算梯度并给出一个精确分解
对任意方向 \(d \in \mathbb{R}^n\),有
由可微函数的一阶展开 \(f(x+d) = f(x) + \langle \nabla f(x), d \rangle + o(|d|)\) 可知
因而对任意 \(x,y\)(令 \(d=y-x\))进一步得到精确恒等式
(2) \(L\)-光滑性(引用定义 4:梯度 Lipschitz)
由 \(\nabla f(x) = 2Qx\),对任意 \(x,y\) 有
因此 \(f\) 是 \(L\)-光滑的,且可以取
这里 \(\lambda_{\max}(\cdot)\) 为最大特征值,\(\sigma_{\max}(A)\) 为最大奇异值。
(3) \(\mu\)-强凸性(引用定义 3:二次下界)
由上面的精确分解可知:对任意 \(x,y\),
记 \(d:=y-x\)。由对称矩阵的谱性质,
因而
与定义 3 的形式 \(\frac{\mu}{2}|y-x|_2^2\) 对比,可取
- 若 \(A\) 列满秩(\(\mathrm{rank}(A)=n\)),则 \(\sigma_{\min}(A) > 0\),从而 \(\mu>0\),\(f\) 是 \(\mu\)-强凸函数。
- 若 \(A\) 不是列满秩,则存在非零向量 \(d \ne 0\) 使得 \(Ad=0\)(零空间非平凡)。取 \(x=0, y=d\),则 \(f(y)=f(x)=0\) 且 \(\nabla f(x)=0\)。若存在某个 \(\mu>0\) 使定义 3 成立,则应有
$$ 0 = f(y) \ge f(x) + \langle \nabla f(x), y-x \rangle + \frac{\mu}{2}|y-x|_2^2 = \frac{\mu}{2}|d| _2^2 > 0, $$
矛盾。因此当 \(A\) 非列满秩时,\(f\) 不可能是任何 \(\mu>0\) 的强凸函数(只能取 \(\mu=0\) 退化为一般凸)。
(4) 与提示的对应关系(用 \(AA^T\) 表示)
\(A^T A\) 与 \(AA^T\) 具有相同的非零特征值,且它们都等于 \(A\) 的非零奇异值的平方;同时 \(\mathrm{rank}(A)=\mathrm{rank}(A^T A)=\mathrm{rank}(AA^T)\)。因此也可以写
并且当 \(A\) 列满秩时
其中 \(\lambda_{\min}^+(AA^T)\) 表示 \(AA^T\) 的最小非零特征值。
3 梯度下降算法¶
3.0 梯度的计算:雅各比、链式法则与反向传播¶
梯度下降的核心是每一步都要计算 \(\nabla f(x_k)\)。在训练 基础模型 时,\(f\) 往往是由大量的矩阵运算与非线性函数复合而成的目标(例如经验风险 + 正则项),梯度需要通过 链式法则 高效计算;在神经网络语境下,这套系统化的链式法则实现就是 反向传播(backpropagation)。
3.0.1 梯度与雅各比(形状约定)¶
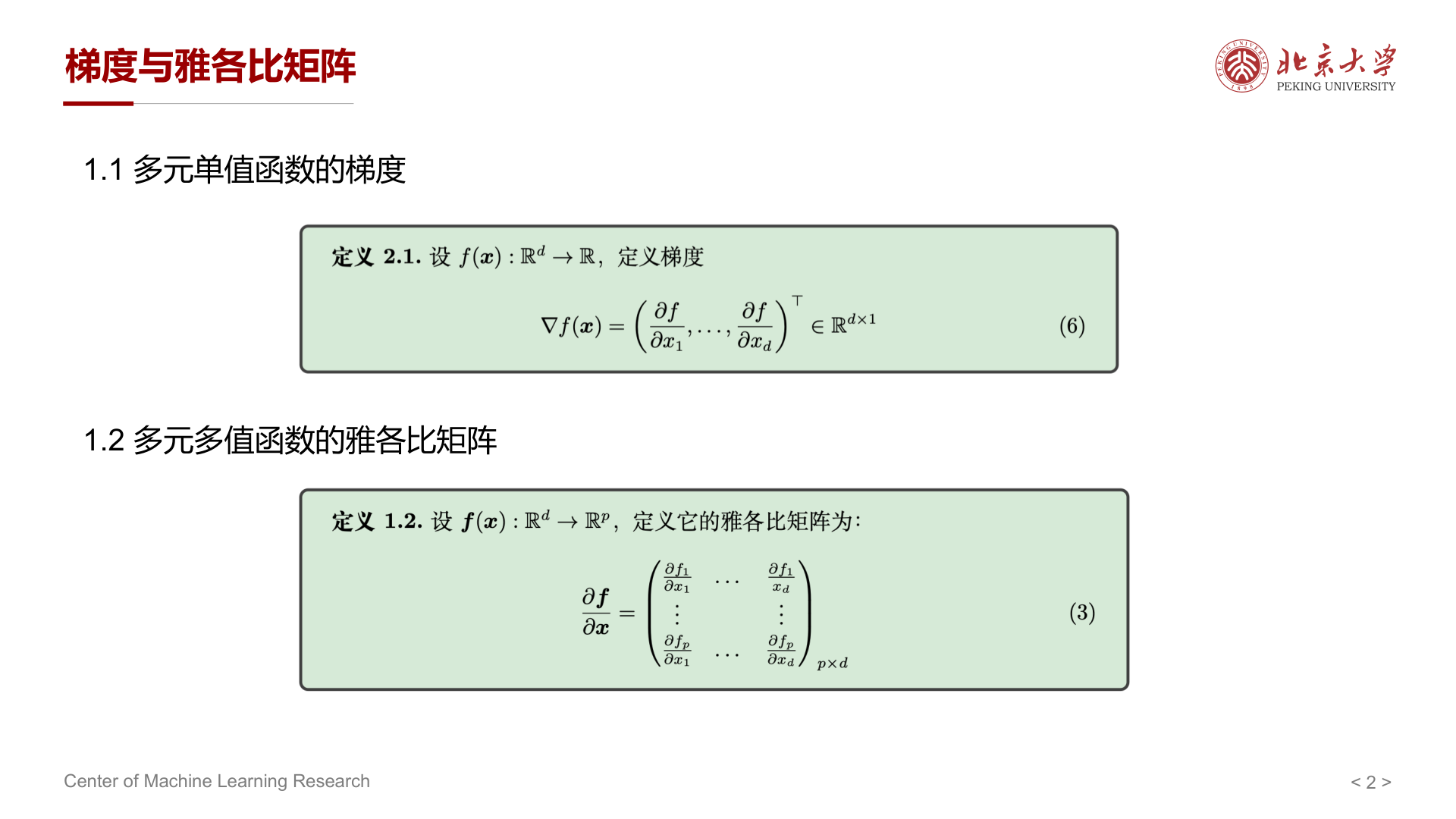
对 \(f:\mathbb{R}^d\to \mathbb{R}\),梯度有两种常见约定:
- 数学分析 常用行向量梯度:\(\nabla f(x)\in\mathbb{R}^{1\times d}\),满足 \(df=\nabla f(x)\,dx\)。
- 机器学习 常用列向量梯度:\(\nabla f(x)\in\mathbb{R}^{d\times 1}\),满足 \(df=dx^\top\nabla f(x)\)。
对向量值函数 \(g:\mathbb{R}^d\to\mathbb{R}^p\),其雅各比矩阵定义为
3.0.2 链式法则的矩阵形式¶
设 \(y=g(x):\mathbb{R}^d\to\mathbb{R}^p\),\(f=f(y):\mathbb{R}^p\to\mathbb{R}\)。用行向量梯度写链式法则最直接:
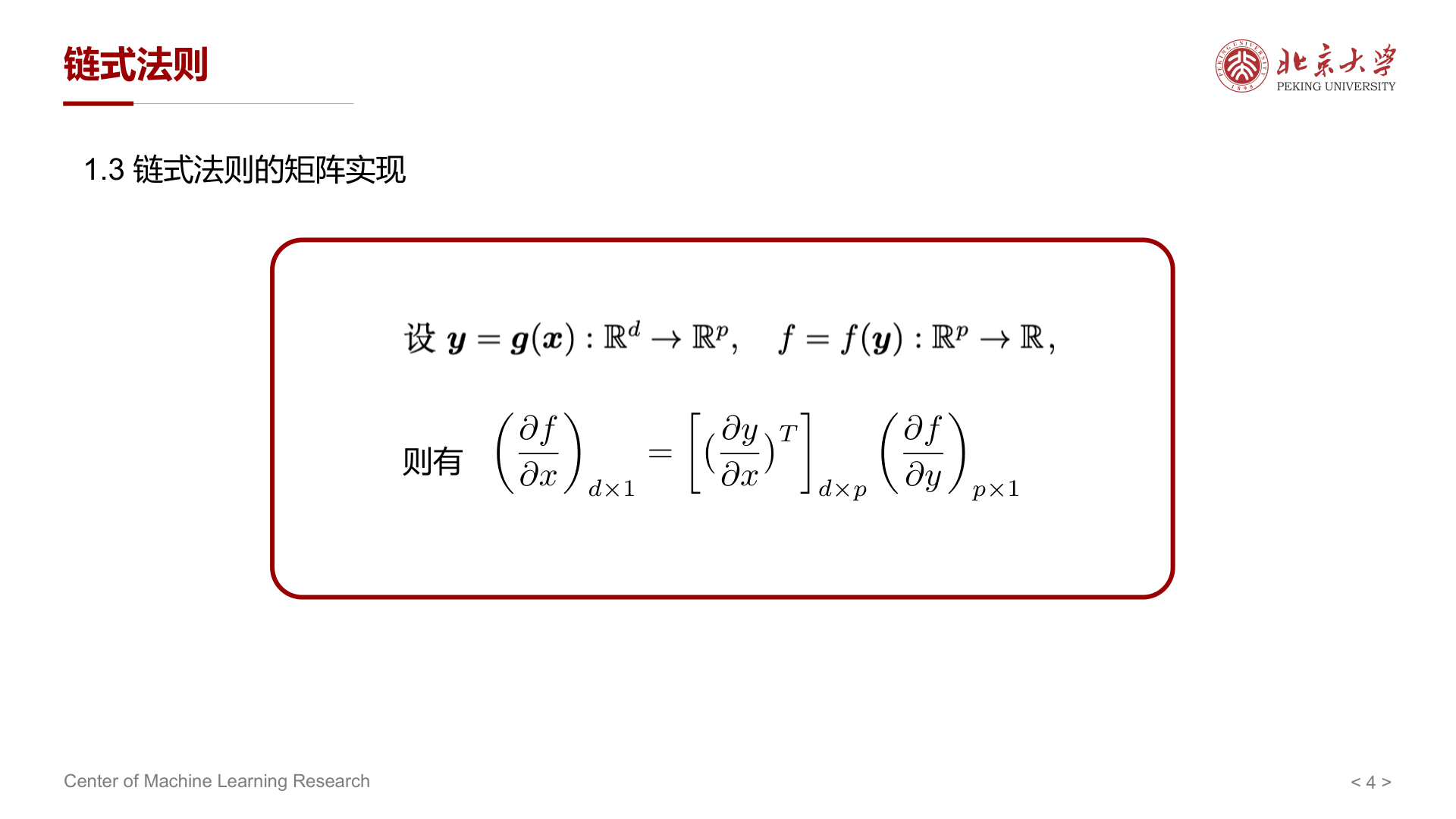
若采用机器学习常见的列向量梯度,则等价地有
3.0.3 标量对矩阵的导数:微分与 Frobenius 内积¶
当参数是矩阵 \(W\in\mathbb{R}^{m\times n}\) 且 \(f(W)\in\mathbb{R}\) 时,常用约定是令矩阵梯度与 \(W\) 同形,并用 Frobenius 内积表达微分:
一个非常常用的结论是:若 \(y=Wx\),\(f=f(y)\),采用列向量梯度 \(\nabla_y f\in\mathbb{R}^{p\times 1}\),则
3.0.4 反向传播例:三层网络¶
下图给出一个三层网络的前向与反向量在计算图上的流动方式:
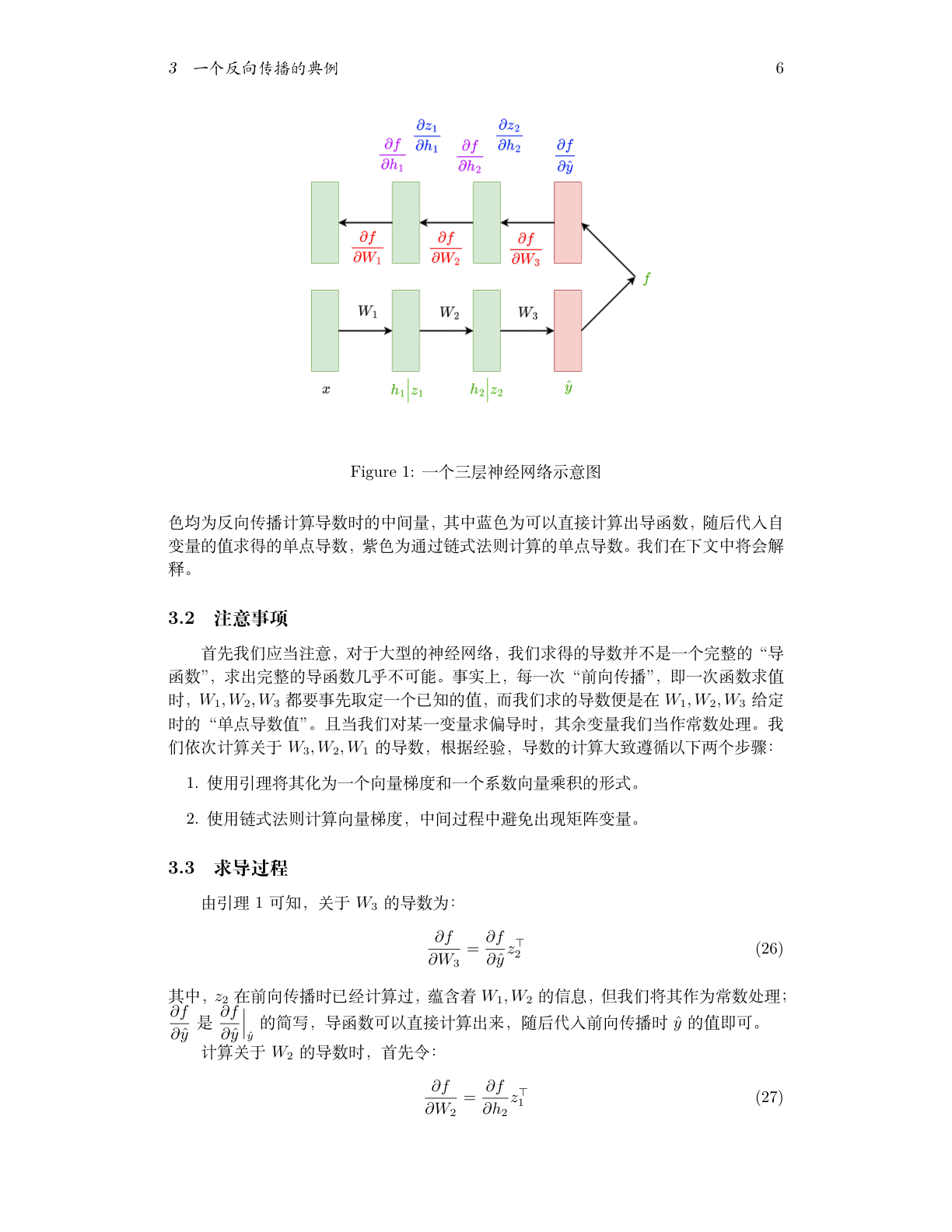
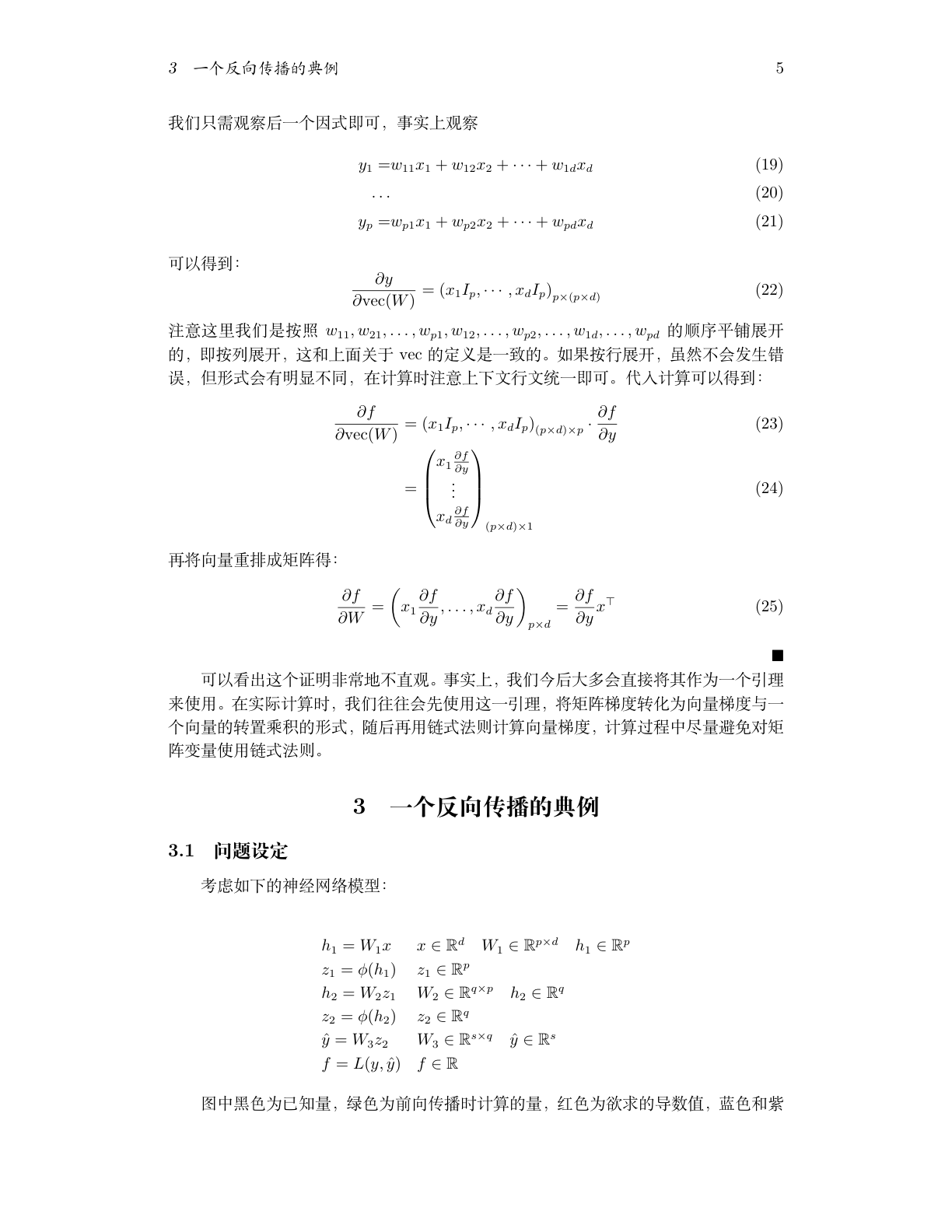
定义前向传播:
需要强调的是:对大规模网络而言,我们并不会、也几乎不可能写出关于所有参数的“完整导函数”。反向传播在每一次前向传播给定 \(W_1,W_2,W_3\) 的数值后,计算的是这些点上的 单点导数值(也就是当前参数处的梯度)。
令 \(\delta_3 := \nabla_{\hat{y}} L(y,\hat{y})\),反向传播可以写成一组递推:
其中 \(\odot\) 是逐元素乘法。这个递推把“对每个参数的偏导”转化为“沿计算图从右向左传播误差信号”,从而能在与前向传播同阶的时间复杂度内得到所有参数的梯度。
3.1 算法描述¶
3.1 算法描述¶
对于 光滑 且 无约束 的优化问题,梯度下降 (Gradient Descent, GD) 是一种非常有效的求解方法。
给定任意初始点 \(x_0\),梯度下降的迭代公式为:
其中 \(\gamma\) 是 学习率 (或 步长 ,learning rate / step size)。
每一步沿 负梯度方向 移动,因为负梯度是函数值下降最快的方向。
3.2 驻点 (Stationary Solution)¶
给定可微函数 \(f(x)\),\(x^\star\) 是 驻点 当且仅当:
驻点包含三种类型:
- 局部极小值 (local minimum):函数在该点附近取最小值
- 局部极大值 (local maximum):函数在该点附近取最大值
- 鞍点 (saddle point):在某些方向是极小、某些方向是极大
凸函数的特殊性质
对于 凸函数 ,所有驻点都是 全局最优解 。这是凸优化理论中最重要的性质之一。
4 收敛性分析¶
4.1 光滑非凸问题¶
假设 3.1(\(L\)-光滑)
\(f(x)\) 是 \(L\)-光滑的,即存在常数 \(L > 0\) 使得
函数值递减引理¶
引理(函数值递减 / Decay in Function Value)
假设 \(f(x)\) 是 \(L\)-光滑的。若 \(\gamma \le 1/L\),则
证明
由 \(L\)-光滑性(假设 3.1),有
代入 GD 更新公式 \(x_{k+1} - x_k = -\gamma \nabla f(x_k)\):
最后一步在 \(\gamma \le 1/L\) 时成立(此时 \(1 - \frac{\gamma L}{2} \ge \frac{1}{2}\))。\(\square\)
由此可以得到 \(\{f(x_k)\}\) 是 严格递减序列 :
这意味着在选择足够小的学习率时,梯度下降的每一步都会使函数值 严格下降 。
非凸收敛定理¶
定理 1(非凸收敛 / Non-convex Convergence)
假设 \(f(x)\) 是 \(L\)-光滑的。若 \(\gamma = 1/L\),梯度下降的收敛速率为
证明
由函数值递减引理,移项可得
对 \(k = 0, 1, \cdots, K\) 求和并除以 \((K+1)\):
右侧利用了求和的 伸缩性 (telescoping):\(\sum_{k=0}^{K} (f(x_k) - f(x_{k+1})) = f(x_0) - f(x_{K+1})\),以及 \(f(x_{K+1}) \ge f^\star\)。
当 \(\gamma = 1/L\) 时,代入得
证毕。\(\square\)
关键要点 :
- 如果 遍历平均 (ergodic average) 趋于 0,则 \(\|\nabla f(x_k)\| \to 0\),即梯度下降收敛到驻点
- 更小的 \(\gamma\) 导致更慢的收敛
- 收敛速率为 \(O(L/K)\)——即需要 \(K\) 次迭代才能使平均梯度范数降到 \(O(L/K)\) 量级
推论 3.3(迭代复杂度)
在假设 3.1 下,若 \(\gamma = 1/L\),梯度下降的 迭代复杂度 为 \(O(L/\epsilon)\)。
证明
迭代复杂度 (iteration complexity) 指算法达到 \(\epsilon\)-精确解所需的迭代次数。
由定理 1,为保证梯度下降收敛到 \(\epsilon\)-精确解,只需令
即 \(K \ge \frac{2L(f(x_0) - f^\star)}{\epsilon} - 1\)。因此迭代复杂度为 \(K = O(L/\epsilon)\)。\(\square\)
4.2 光滑凸问题¶
辅助引理¶
引理 3.4(梯度范数上界)
若 \(f(x)\) 是 \(L\)-光滑的(不需要凸性假设),则
证明
令 \(y = x - \frac{1}{L}\nabla f(x)\) 代入 \(L\)-光滑性条件:
移项即得 \(\|\nabla f(x)\|^2 \le 2L(f(x) - f^\star)\)。\(\square\)
凸收敛定理¶
假设 3.6(凸 + \(L\)-光滑)
\(f(x)\) 是凸的且 \(L\)-光滑的,即存在常数 \(L > 0\) 使得
定理 2(凸收敛 / Convex Convergence)
在假设 3.6 下,若 \(\gamma = 1/(2L)\),梯度下降的收敛速率为
证明
由 GD 迭代公式 \(x_{k+1} = x_k - \gamma \nabla f(x_k)\),展开 \(\|x_{k+1} - x^\star\|^2\):
利用以下两个引理进行放缩:
- 引理 3.5(凸性质) :\(\langle \nabla f(x_k), x_k - x^\star \rangle \ge f(x_k) - f(x^\star) = f(x_k) - f^\star\)(令 \(x = x_k, y = x^\star\))
- 引理 3.4 :\(\|\nabla f(x_k)\|^2 \le 2L(f(x_k) - f^\star)\)
代入得
当 \(\gamma = 1/(2L)\) 时,\(2\gamma(1 - L\gamma) = \frac{1}{2L}\),因此
移项得
对 \(k = 0, 1, \cdots, K\) 求和并除以 \((K+1)\)(伸缩求和):
由函数值递减性 \(f(x_{k+1}) \le f(x_k)\)(见式 (5)),可知 \(f(x_K) \le f(x_k)\) 对所有 \(k \le K\) 成立,因此
证毕。\(\square\)
关键要点 :
- 对于凸函数,\(f(x_k) \to f^\star\),收敛速率为 \(O(L/K)\)——函数值以 次线性速率 趋近最优值
- 与非凸情形相比,凸情形衡量的是 函数值 的收敛(而非梯度范数的收敛)
推论 3.8(迭代复杂度)
在假设 3.6 下,若 \(\gamma = 1/(2L)\),梯度下降的迭代复杂度为 \(O(L/\epsilon)\)。
4.3 光滑强凸问题¶
辅助引理¶
引理 3.10(\(L\)-光滑 \(\mu\)-强凸性质)
设 \(f: \mathbb{R}^n \to \mathbb{R}\) 为 \(L\)-光滑且 \(\mu\)-强凸函数,则对 \(\forall x, y \in \mathbb{R}^n\) 有
此引理将强凸性和光滑性 结合 在一个不等式中,是强凸收敛分析的关键工具。
强凸收敛定理¶
假设 3.9(\(\mu\)-强凸)
\(f(x)\) 是 \(\mu\)-强凸的,即存在常数 \(\mu > 0\) 使得
定理 3(强凸收敛 / Strongly-Convex Convergence)
在假设 3.6 和假设 3.9 下,若 \(\gamma = 2/(L + \mu)\),梯度下降的收敛速率为
证明
由 GD 迭代公式,展开 \(\|x_{k+1} - x^\star\|^2\):
由最优性条件 \(\nabla f(x^\star) = 0\),上式等价于
应用引理 3.10(令 \(y = x_k, x = x^\star\)),得
代入并整理:
当 \(\gamma = \frac{2}{\mu + L}\) 时,\(\frac{2\gamma}{\mu + L} - \gamma^2 = \frac{4}{(\mu+L)^2} - \frac{4}{(\mu+L)^2} = 0\),第二项消失。因此
最后一步利用了恒等式 \(1 - \frac{4\mu L}{(\mu+L)^2} = \frac{(\mu+L)^2 - 4\mu L}{(\mu+L)^2} = \frac{(L-\mu)^2}{(\mu+L)^2}\)。
取平方根:\(\|x_{k+1} - x^\star\| \le \frac{L-\mu}{L+\mu}\|x_k - x^\star\|\)。
递归展开得 \(\|x_K - x^\star\| \le \left(\frac{L-\mu}{L+\mu}\right)^{K+1}\|x_0 - x^\star\|\)。\(\square\)
关键要点 :
- 对于强凸函数,\(x_k \to x^\star\),收敛速率为 \(O\!\left(\left(1 - \frac{1}{\kappa}\right)^k\right)\)
- 其中 \(\kappa = L/\mu\) 是函数的 条件数 (condition number)
- 梯度下降在强凸问题上以 指数速度 (也称 线性速度 )收敛——这是三种情形中最快的
- 条件数 \(\kappa\) 越大,收敛越慢
推论 3.12(迭代复杂度)
在假设 3.6 和假设 3.9 下,若 \(\gamma = 2/(L + \mu)\),梯度下降的迭代复杂度为 \(O\!\left(\frac{L}{\mu}\log\frac{1}{\epsilon}\right)\)。
证明
由定理 3,要求
取对数:
当 \(L \gg \mu\) 时,\(\log\frac{L + \mu}{L - \mu} \approx \frac{2\mu}{L - \mu} \approx \frac{2\mu}{L}\),因此
证毕。\(\square\)
指数收敛 vs. 次线性收敛
强凸情形的迭代复杂度为 \(O(\kappa \log(1/\epsilon))\),依赖于 \(\log(1/\epsilon)\) 而非 \(1/\epsilon\)。这意味着每增加一个数量级的精度只需要 常数倍 的额外迭代,比非凸和一般凸情形高效得多。
5 收敛速率总结¶
| 收敛速率 | 迭代复杂度 | |
|---|---|---|
| 光滑非凸 (Smooth non-convex) | \(\frac{2L(f(x_0) - f^\star)}{K}\) | \(O\!\left(\frac{L}{\epsilon}\right)\) |
| 光滑凸 (Smooth convex) | \(\frac{2L\|x_0 - x^\star\|^2}{K}\) | \(O\!\left(\frac{L}{\epsilon}\right)\) |
| 光滑强凸 (Smooth strongly-convex) | \(\left(\frac{L - \mu}{L + \mu}\right)^K \|x_0 - x^\star\|\) | \(O\!\left(\frac{L}{\mu}\log\frac{1}{\epsilon}\right)\) |
对比理解
- 非凸 和 凸 问题的收敛速率均为 \(O(L/K)\),迭代复杂度为 \(O(L/\epsilon)\)——次线性收敛
- 强凸 问题的收敛速率为指数级(线性收敛),迭代复杂度为 \(O(\kappa \log(1/\epsilon))\)——显著更快
- 强凸性提供了更强的 "曲率" 保证,使得梯度下降能更高效地定位最优解
6 实验¶
6.1 非凸函数上的梯度下降¶
最小化非凸光滑函数:
设学习率 \(\gamma = \frac{1}{40}\)。从起始点出发,梯度下降沿着负梯度方向逐步下降,最终收敛到一个 局部最小值 (而非全局最小值)。损失函数随迭代次数单调递减后趋于稳定,验证了函数值递减引理的结论。
6.2 凸函数上的梯度下降¶
最小化凸光滑函数:
容易验证 \(f(x)\) 是 \(L\)-光滑的,其中 \(L = 2\)。
学习率对收敛性的影响 :
- \(\gamma = \frac{1}{5L}\):收敛,但速度较慢——步长太小,每步前进量不足
- \(\gamma = \frac{1}{L}\):快速收敛——步长适中,迅速达到最优解
- \(\gamma = \frac{2.06}{L}\):产生剧烈的 振荡 ——步长过大,在最优解两侧反复跳跃,收敛极慢
学习率选择的重要性
过小和过大的学习率都会导致慢收敛。这突出了梯度下降对学习率选择的 敏感性 。理论上最优学习率通常在 \(1/L\) 至 \(2/(L+\mu)\) 的范围内。
6.3 强凸函数上的梯度下降¶
实验 1 :最小化 \(f(x) = x^2 + x\),学习率 \(\gamma = \frac{8}{9}\)。对数损失函数随迭代次数 线性下降 ,体现了强凸问题的指数收敛特性。
实验 2 :最小化分段函数
其中 \(L = 9, \mu = 3\)。设 \(\gamma = \frac{1}{20} < \frac{2}{L + \mu}\)。将此函数视为两个独立的二次函数时,强凸常数 \(\mu\) 越大的函数收敛越快。这与理论结论一致:较大的 \(\mu\) 意味着更小的条件数 \(\kappa = L/\mu\),从而更快的收敛。
6.4 二元强凸函数上的梯度下降¶
分别最小化以下两个函数:
学习率设置:
- \(f(x,y)\):\(\gamma = \frac{1}{4} = \frac{1}{L+\mu}\)
- \(f_1(x,y)\):\(\gamma_1 = \frac{1}{11} = \frac{2}{L+\mu}\)
条件数对收敛的影响
- \(f(x,y)\) 的条件数 \(\kappa = 1\):等高线为 同心圆 ,梯度方向始终指向最优点,梯度下降沿 直线 走向最优点,收敛极快
- \(f_1(x,y)\) 的条件数 \(\kappa = 10\):等高线为 椭圆 ,梯度方向偏离最优点方向,梯度下降呈现明显的 锯齿形轨迹 (zig-zag),收敛显著变慢
当两个函数共享相同的 \(\mu\) 时,\(L\) 较小的函数(即条件数 \(\kappa\) 更小)收敛更快、迭代复杂度更低。这验证了条件数 \(\kappa = L/\mu\) 是决定梯度下降收敛速度的关键因素。
7 高级话题¶
在本讲中,我们证明了对于 \(L\)-光滑函数:
这意味着梯度下降会收敛到 驻点 (\(\nabla f(x^\star) = 0\))。
问题 :梯度下降会收敛到局部极大值或鞍点吗?
答 :不会!梯度下降以 概率 1 收敛到 局部极小值 。
这一结论来源于动力系统理论——局部极大值和鞍点是梯度流的 不稳定不动点 (unstable fixed points)。从随机初始化出发,梯度下降几乎不可能收敛到这些点。